- file descriptor(fd)
- 磁盘IO的特殊性
- Socket API
- 客户端API
- 服务端API
- int socket(int af, int type, int protocol);
- ssize_t send(int sockfd, const void *buf, size_t len, int flags);
- ssize_t recv(int sockfd, void *buf, size_t len, int flags);
- int bind(int sock, struct sockaddr *addr, socklen_t addrlen);
- int listen(int sock, int backlog);
- int accept(int sock, struct sockaddr *addr, socklen_t *addrlen);
- readv 和 writev 函数
- 总结
- 主机字节序和网络字节序
- SO_REUSEADDR 和 SO_REUSEPORT
file descriptor(fd)
在 linux 系统中,使用 task_struct 管理一个进程,其中的 files_struct 结构则负责管理进程所拥有的文件描述符信息。
files_struct
struct files_struct {
...
struct fdtable *fdt; // 指向的是file结构体
struct fdtable fdtab;
...
};
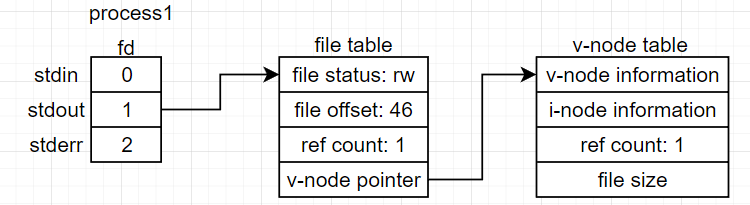
每个 files_struct 都含有 fdtable 结构,本质上是文件描述符的集合,因此 int 类型的文件描述符对应的就是这个集合中的下标,指向file结构体,该结构体保存的是当前进程对文件的打开模式(可读、可写、可读写)、文件偏移量、引用计数,以及指向inode结构体的指针。而且这个集合的前三个位置已经被系统默认分配,默认情况下:
- 0:stdin,标准输入,默认的输入硬件是键盘
- 1:stdout,标准输出,默认的输出硬件是显示器
- 2:stderr,标准错误,默认的输出硬件是显示器
重定向
重定向的底层实现函数是 dup() 和 dup2(),它实现的功能是对文件描述符进行复制,常见的重定向形式有:
- [n] < file:n不填时默认为0,即标准输入,覆盖式
- [n] << file:追加式
- [n] > file:n不填时默认为1,即标准输出,覆盖式
- [n] >> file:追加式
以下面的代码为例:
echo "hello" > file1;
系统首先会为 file1 创建一个文件描述符,然后把这个文件描述符复制给集合中下标为 1 的元素,因此就实现了对标准输出的重定向。
磁盘IO的特殊性
磁盘IO不同于网络IO,磁盘IO只能是阻塞的,也就是并不能将其设置为O_NONBLOCK,对其read/write也不会返回EAGAIN。这是POSIX系统对磁盘文件(regular files)的底层设计,当监听对应的磁盘fd时,总是返回Ready状态,但实际读取时如果文件数据不在内存缓存中,则read操作本身还是会“阻塞”等待数据从磁盘读出。
由于这个原因,EPOLL不支持监听磁盘IO。
Socket API
以BSD Socket为标准(伯克利套接字)
客户端API
int socket(int af, int type, int protocol);
- 参数1:af 为地址族,也就是IP地址的类型,有 AF_INET 和 AF_INET6
- 参数2:type 为套接字类型,常用的有 SOCK_STREAM 和 SOCK_DGRAM
- 参数3:protocol 为传输协议,常用的有 IPPROTO_TCP 和 IPPROTO_UDP,还有 0。当由前两种组合可以确定只有一种协议满足时,可以直接填0,比方说
int clientfd = socket(AF_INET, SOCK_STREAM, 0);此时必定是 TCP 协议类型 - 返回值:返回的是 socket 类型,在 linux 平台上,是 int 类型,而在 windows 平台上是 SOCKET 宏类型,本质上也是一个 int。当返回值为 -1 时,表示申请 socket 套接字失败,否则为大于 0 的值,实际对应的是文件描述符集合中的下标。具体的错误信息可以由 errno 中获取。
int clientfd = socket(AF_INET, SOCK_STREAM, 0);
if (clientfd == -1)
{
std::cout << "create client socket error. " << std::endl;
return -1;
}
int connect(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
- 参数1:系统调用
socket()函数返回的套接字 - 参数2:保存着目标服务器 IP 端口信息的结构体。一般是通过 sockaddr_in(in表示的是ipv4,常见的还有sockaddr_in6,sockaddr_un等)指针转换为 sockaddr 指针
- 参数3:addr 变量的大小,可由 sizeof 计算。在这里该参数不是一个指针,但是在
accept()函数中则需要的是一个指针类型。 - 返回值:当调用失败时返回 -1,且错误信息可由 errno 中获取
- 在阻塞和非阻塞IO下调用方式有区别:
- 阻塞:connect 对应的是 TCP 三次握手的发送 SYN 操作(CLOSE -> SYN_SEND),因此在阻塞模式下会等待服务端返回的
SYN-ACK报文(SYS_SEND -> ESTABLISH),至少阻塞一个RTT时间。// 阻塞模式下 sockaddr_in serveraddr; serveraddr.sin_family = AF_INET; serveraddr.sin_addr.s_addr = inet_addr(SERVER_ADDRESS); // 解析服务端ip地址 serveraddr.sin_port = htons(SERVER_PORT); if (connect(clientfd, (sockaddr*)&serveraddr, sizeof(serveraddr)) == -1) { std::cout << "connect socket error." << std::endl; close(clientfd); return -1; } - 非阻塞: 非阻塞模式下,调用会立即返回,首先需要根据返回状态判断是否需要重试,其次需要在实际使用该clientfd之前,借助
epoll等多路复用技术检测是否已经可写,并且在 linux 平台还需要额外检测判断该 socket 是否报错(在socket 报错的情况下,会返回可写状态,即返回1)// 非阻塞模式下 sockaddr_in serveraddr; serveraddr.sin_family = AF_INET; serveraddr.sin_addr.s_addr = inet_addr(SERVER_ADDRESS); // 解析服务端ip地址 serveraddr.sin_port = htons(SERVER_PORT); while (true) { int ret = connect(clientfd, (sockaddr*)&serveraddr, sizeof(serveraddr)); if (ret == 0) { std::cout << "connect to server successfully." << std::endl; break; } else if (ret == -1) { if (errno == EINTR) { // 这里是因为系统没有资源,所以暂时不能执行,因此我们需要使用循环继续判断 std::cout << "connecting interruptted by signal, try again." << std::endl; continue; } else if (errno == EINPROGRESS) { // 这里是因为已经开始建立连接了,因为是non-blocking的原因,因此立即返回了,接下来只需要在select/poll中判断是否是可写事件,最后还需要使用getsockopt判断连接是否成功 std::cout << "auto try connect now, don't need to try again." << std::endl; break; } else { close(clientfd); std::cout << "connect error." << std::endl; return -1; } } } fd_set writeset; FD_ZERO(&writeset); FD_SET(clientfd, &writeset); timeval tv; tv.tv_sec = 3; // 这里是阻塞时间,如果系统允许长时间阻塞那么这里要大点,否则可能出现实际可连接(就是较慢)但是因为超时而直接关闭了 tv.tv_usec = 0; if (select(clientfd + 1, NULL, &writeset, NULL, &tv) != 1) // 阻塞等待一段时间让其成功建立三次握手,如果建立成功那么会返回可写,当然也可能是出错了,所以下面还要继续判断 { std::cout << "[select] connect to server error." << std::endl; // 三次握手失败了 close(clientfd); return -1; } // 补充判断阶段: int err; socklen_t len = static_cast<socklen_t>(sizeof(err)); if(getsockopt(clientfd, SOL_SOCKET, SO_ERROR, &err, &len) < 0){ // 证明可写事件是因为出错了 close(clientfd); return -1; } if (err == 0){ // 建立成功 std::cout << "connect to server successfully." << std::endl; } else{ // 出现异常 std::cout << "connect to server error." << std::endl; close(clientfd); return -1; }
- 阻塞:connect 对应的是 TCP 三次握手的发送 SYN 操作(CLOSE -> SYN_SEND),因此在阻塞模式下会等待服务端返回的
ssize_t send(int sockfd, const void *buf, size_t len, int flags);
相比于ssize_t write(int fd, const void* buf, size_t nbytes)多了一个标志位,可以更好的进行控制,但是write函数可用于向管道写入数据
- 参数1:套接字
- 参数2:待发送的数据缓存
- 参数3:指明 buf 的长度
- 参数4:标志位,一般填 0
- 返回值:当处于阻塞模式下时,会阻塞到可以完整发送数据时才返回,如当对端的接收窗口过小时,会导致一直阻塞,如果返回的值不等于 len,则代表发送失败;在非阻塞模式下,需要考虑成功发送一部分(0 < ret < len),-1 和 ==len 的情况。当 ==0 时,一般意味着连接断开,如果是主动发送 0 字节长度的数据,虽然返回值依然是 0 但是底层会过滤掉,不会发送给对端,因此我们一般使用是否等于 len 去判断,而不是直接判断0。接收端的 recv 则可通过是否为0进行判断。
- 在阻塞和非阻塞IO下调用方式有区别:
-
阻塞:在阻塞模式下,会一直阻塞到发送完预设的数据长度,除非发生异常
本质上是两次阻塞:1.阻塞等待有足够的写入空间;2.阻塞进行数据的从用户态到内核态的copy。
int ret = send(clientfd, SEND_DATA, strlen(SEND_DATA), 0); // 这里使用的是阻塞模式,当无法发送时,会阻塞在这里. if (ret != strlen(SEND_DATA)) { std::cout << "send data error." << std::endl; break; } else { std::cout << "send data successfully, count = " << count << std::endl; } -
非阻塞:在非阻塞模式下,要考虑发送是否被中断(INTER),或者因窗口过小而暂时无法发送(EWOULDBLOCK、EAGAIN),且需要使用循环判断是否完整的发送完数据
非阻塞模式下,只有copy时的一次阻塞
while (true) { if (SendData(clientfd, SEND_DATA, strlen(SEND_DATA, 0))) { std::cout << "send data successfully " << std::endl; } else { std::cout << "send data error." << std::endl; break; } } close(clientfd); // 发送函数,动态计算要发送的数据 bool SendData(int fd, const char* buf, int buf_len, int flag = 0) { int send_len = 0; int ret = 0; while (true) { ret = send(fd, buf + send_len, buf_len - send_len, flag); if (ret == -1) { if (errno == EINTR || errno == EWOULDBLOCK || errno == EAGAIN) { // 当前无法发送,但是连接是正常的,因此进行重试 std::cout << "TCP Window size is too small or interrupted by single" << std::endl; continue; } else { std::cout << "send data error." << std::endl; return false; } } else if (ret == 0) // 在实际工程项目中,如果我们保证每次发送字节长度大于0的数据,那么此处返回0则代表了连接已经断开。 { std::cout << "send data error." << std::endl; return false; } send_len += ret; if (send_len == buf_len) // 已经完整的发送 { return true; } } }
-
ssize_t recv(int sockfd, void *buf, size_t len, int flags);
相比于ssize_t read(int fd, void* buf, size_t nbyte)多了一个标志位,但是read函数可用于从管道套接字读取数据
- 参数1:套接字
- 参数2:接收缓冲区
- 参数3:接收缓冲区的大小
- 参数4:标志位,一般为 0
- 返回值:在阻塞模式下,==0 意味着连接断开,-1 异常,>0 接收到数据(注意不一定等于预设的len);非阻塞模式下,0依然意味着连接断开,而 -1 时需要考虑中断情况
- 在阻塞和非阻塞IO下调用方式有区别:
- 阻塞:本质上是两次阻塞:1.阻塞等待有可读数据;2.阻塞进行数据的从内核态到用户态的copy
char buf[32] = {0}; int ret = recv(clientfd, buf, 32, 0); // 当没有接收到数据时,会阻塞在这里 if (ret > 0) { std::cout << "recv successfully." << std::endl; } else { std::cout << "recv data error." << std::endl; } - 非阻塞:只有copy时的一次阻塞
while (true) { char recvbuf[32] = {0}; int ret = recv(clientfd, recvbuf, 32, 0); if (ret > 0) { std::cout << "recv successfully." << std::endl; } else if (ret == 0) { std::cout << "peer close the socket." << std::endl; break; } else if (ret == -1) { if (errno == EINTR || errno == EAGAIN || errno == EWOULDBLOCK) { std::cout << "There is no data avaliable now or interrupted" << std::endl; } else { break; } } } close(clientfd);
- 阻塞:本质上是两次阻塞:1.阻塞等待有可读数据;2.阻塞进行数据的从内核态到用户态的copy
服务端API
int socket(int af, int type, int protocol);
与客户端同
ssize_t send(int sockfd, const void *buf, size_t len, int flags);
与客户端同
ssize_t recv(int sockfd, void *buf, size_t len, int flags);
与客户端同
int bind(int sock, struct sockaddr *addr, socklen_t addrlen);
- 参数1:套接字
- 参数2:保存着目标服务器IP端口信息的结构体。一般是通过 sockaddr_in 指针转换为 sockaddr 指针
- 参数3:addr 的大小
- 返回值:-1 表示错误
// 初始化服务器地址
sockaddr_in bindaddr; // C++中struct可以不加
bindaddr.sin_family = AF_INET;
// htonl (h: host; to: to; n: net; l: unsigned long) 意思是将计算机的内存顺序转换成网络字节顺序,网络字节序是大端序
// htons 也是一样的作用
// INADDR_ANY表示应用程序不关心bind绑定的ip,由底层自动选择一个合适的ip地址,适合在多网卡机器上选择ip,相当于0.0.0.0
// 如果只是想在本机上访问,则绑定ip可以使用127.0.0.1
// 局域网中的内部机器访问,则绑定机器的局域网ip
// 公网访问则需要是0.0.0.0或者 INADDR_ANY
bindaddr.sin_addr.s_addr = htonl(INADDR_ANY);
// 服务端只需要bind一个固定的端口,而如果是客户端则不能,否则同台机器将会无法启动多个客户端,因此对于客户端来说不进行bind或者要使用bind(0),由底层自动分配
// 原因:tcp使用4元组进行区分,server虽然只有一个port,但是连接的client有不同的ip和port,因此可以构成不同的四元组.
bindaddr.sin_port = htons(3000);
if (bind(listenfd, (sockaddr*)&bindaddr, sizeof(bindaddr)) == -1){
std::cout << "bind listen socket error." << std::endl;
close(listenfd);
return -1;
}
int listen(int sock, int backlog);
- 参数1:套接字
-
参数2:backlong 参数,一般使用 SOMAXCONN 参数
作用1:决定全连接队列的上限 = min(SOMAXCONN, backlog);
作用2:决定半连接队列的上限 = min(SOMAXCONN, backlog, tcp_max_syn_backlog);
- 返回值:-1表示失败
// 如果设置为SOMAXCONN则是由系统决定(可能是几百),当请求队列满了客户端会接收到ECONNREFUSED错误(linux)/ WSAECONNREFUSED错误(windows)
if (listen(listenfd, SOMAXCONN) == -1){
std::cout << "listen error." << std::endl;
close(listenfd);
return -1;
}
int accept(int sock, struct sockaddr *addr, socklen_t *addrlen);
- 参数1:套接字
- 参数2:一个空的 sockaddr_in 结构体指针,用以保存客户端信息。一般是通过 sockaddr_in 指针转换为 sockaddr 指针。
- 参数3:指向 socklen_t 的指针,本质就是一个 int 指针,这里传入指针的原因是第二个传入的 sockaddr 参数会被底层填充数据,因此传入长度指针用以标识填充后的新大小。
- 返回值:-1 表示错误,函数的功能是把连接从全连接队列中取出
- 在阻塞和非阻塞IO下调用方式有区别:
- 阻塞:
sockaddr_in clientaddr; socklen_t clientaddrlen = sizeof(clientaddr); int clientfd = accept(listenfd, (sockaddr*)&clientaddr, &clientaddrlen); if (clientfd != -1){ // 如果后续不调用recv函数,那么服务端的接收窗口会一步步被塞满,而最终导致客户端的发送窗口也被塞满。 std::cout << "accept a client connection. " << std::endl; } - 非阻塞:
while (true){ sockaddr_in clientaddr; socklen_t clientaddrlen = sizeof(clientaddr); int clientfd = accept(listenfd, (sockaddr*)&clientaddr, &clientaddrlen); if (clientfd == -1){ if (errno == EINTR || errno == EWOULDBLOCK || errno == EAGAIN){ std::cout << "empty accept queue or interrupted by single" << std::endl; continue; } else{ std::cout << "accept error." << std::endl; break; // 这里直接退出了,可能会导致会面的accept接收队列不被处理,需要谨慎。 } } else { std::cout << "accept successfully." << std::endl; // 将该clientfd保存起来,以作后续操作 } }
- 阻塞:
readv 和 writev 函数
- ssize_t readv(int fd, const struct iovec *iov, int iovcnt);
- ssize_t writev(int fd, const struct iovec *iov, int iovcnt);
- ssize_t preadv(int fd, const struct iovec *iov, int iovcnt, off_t offset);
- ssize_t pwritev(int fd, const struct iovec *iov, int iovcnt, off_t offset);
用以将多个缓冲区数据同时写入一个 fd 套接字,使用read/write则需要循环调用,这其中会引起用户态和内核态的切换,造成额外的性能开销。
struct iovec {
void *iov_base; // 数据起始地址
size_t iov_len; // 数据要传输的字节数
}
示例代码:
char *info1 = "time to sleep";
char *info2 = "go to work";
struct iovec iov[2];
iov[0].iov_base = info1;
iov[0].iov_len = strlen(info1);
iov[1].iov_base = info2;
iov[1].iov_len = strlen(info2);
ssize_t nwritten = writev(fd, iov, 2); // 返回成功写入的字节数
总结
- 阻塞模式和非阻塞模式下,有影响的API有:connect、accpet、send、recv
- 阻塞模式和非阻塞模式的最大区别是,当非阻塞模式下读取或写入数据失效时,会返回响应的错误码,这在 IO 多路复用上有极大的应用。比方说,在 epoll 的 LT 模式下,某个 fd 有可读数据时会一直触发 EPOLLIN 事件信号。假设数据超过了一次读取预设的接收缓冲区,如果使用阻塞 recv,那么要么等待下一次的 EPOLLIN 事件才进行继续读取,要么就需要强制使用循环去读,而这可能在某次读取把剩余数据读取完之后,再读取时发生 recv 空数据从而造成阻塞。显而易见这种做法效率不高。如果使用的是非阻塞 recv,就可以在一次 EPOLLIN 事件里面,循环读取完,直到触发 EAGAIN 或 EWOULDBLOCK 信号再退出,效率更高。
而且,根据 man select 中的描述,有可能出现提示有可读事件,但是由于校验和不通过等原因而丢弃数据的情况,因此在 IO 多路复用下需要使用非阻塞IO
主机字节序和网络字节序
主机字节序
以 0x10203040 存储到 4001 开始的内存位置为例:
- 大端序:数据的低位字节放在内存的高位,高位字节放在内存的低位,符合人类的阅读习惯
4001 4002 4003 4004 10 20 30 40 - 小端序:数据的低位字节放在内存的低位,高位字节放在内存的高位
4001 4002 4003 4004 40 30 20 10
网络字节序(TCP/IP规定的字节序)
规定为 大端序,因此当传入 TCP 时,需要进行字节序转换
uint32_t htonl(uint32_t netlong); // 将 long 类型转换为网络字节序
uint16_t htons(uint16_t netshort); // 将 short 类型转换为网络字节序
判断本机字节序的方式:
Intel 的 CPU 是小端序,以下我们通过代码进行验证:
#include <iostream>
int main()
{
unsigned short a = 0x1234;
unsigned char b = (unsigned char)a; // int转char会丢失精度,即保留内存低地址部分而舍弃内存高地址部分
printf("%x\n", a); // 0x1234
printf("%x\n", b); // 0x34,保留的低地址部分是34,说明是小端序
}
SO_REUSEADDR 和 SO_REUSEPORT
SO_REUSEADDR
默认情况下,一个 Socket 以五元组作为唯一标识:{<protocol>, <src addr>, <src port>, <dest addr>, <dest port>}。
0.0.0.0 代表着绑定本机所有网卡地址,因此在没有 SO_RESUEADDR 配置下,0.0.0.0:21 和 192.168.0.1:21 将会绑定失败。假设当前机器具有多个网卡,则各网卡之间的绑定关系如下表所示:
| SO_REUSEADDR | socketA | socketB | Result |
|---|---|---|---|
| ON/OFF | 192.168.0.1:21 | 192.168.0.1:21 | Error |
| ON/OFF | 192.168.0.1:21 | 10.0.0.1:21 | OK |
| ON/OFF | 10.0.0.1:21 | 192.168.0.1:21 | OK |
| OFF | 0.0.0.0:21 | 192.168.0.1:21 | Error |
| OFF | 192.168.0.1:21 | 0.0.0.0:21 | Error |
| ON | 0.0.0.0:21 | 192.168.0.1:21 | OK |
| ON | 192.168.0.1:21 | 0.0.0.0:21 | OK |
| ON/OFF | 0.0.0.0:21 | 0.0.0.0:21 | Error |
所以 SO_REUSEADDR 的第一个关键作用就是解决绑定 0.0.0.0 情况下的冲突问题。
同时当 TCP 主动关闭时,会进入TIME_WAIT状态,正常情况下会使程序无法在一段时间(2MSL,linux 默认是 60s)内无法重用对应的 IP 和端口,这使得应用程序关闭重启后会无法再绑定到对应的端口。
开启 SO_REUSEADDR 后即可立即重用,这里要注意如果端口本身已经被某个 socket 绑定,且正处于TCP_LISTEN状态,则会绑定失败;否则,将会使得旧的 socket 被关闭,而后本程序才会绑定到这个端口。所以本身这个参数的设计意义在于进程意外宕机或者重启之后迅速去重新建立连接,不同的应用程序应该绑定不同的端口,而不是进行端口抢占。
所以 SO_REUSEADDR 的第二个关键作用就是复用处于 TIME_WAIT 状态的连接地址。
在 BSD 上使用 SO_REUSEADDR 参数不需要关心其他 socket 是否设置了相同的 SO_REUSEADDR 参数,只要一方有设置,则设置方便可生效。但是在 linux 上必须要所有 socket 都设置。
SO_REUSEPORT
在 socket 服务端开发的过程中,我们遵循的步骤一般为:
- 调用 socket() 函数创建一个 listenfd
- 为该 listenfd 调用 bind() 函数绑定一个 IP + PORT
- 使用 listen() 函数监听该 listenfd
- 调用 accept() 函数阻塞/非阻塞的创建一个 clientfd
在早期的开发流程中,一般有两种多进程的开发模式:
- 使用的是一个父进程去调用
socket() + bind() + listen() + accept(),当成功 accept 了一个 clientfd 之后,再 fork 出一个子进程去处理这个 clientfd,也就是说只会有一个进程进行监听。 - 使用的是一个父进程去调用
socket() + bind() + listen(),然后 fork 出多个子进程去同时调用 accept() 函数对这个 listenfd 进行 accept 操作,这种方式同时有多个进程进行监听,但是这种做法早期会有惊群问题,不过在 linux2.6 之后,当多个进程同时调用 accept 同个 listenfd 时,使用的是prepare_to_wait_exclusive的互斥方式将所有的进程添加到 listenfd 的监听队列中,因此不再有惊群现象。
在上面的两种形式,终究都是为每一个 clientfd 创建一个处理进程,而 IO 事件实际上往往只是一瞬间的事情,因此在处理完成之后,要么阻塞的等待下一次事件的到来,要么就销毁进程/线程,可见这种做法有严重的性能问题
为了使用提升性能,避免频繁的开创和销毁进程/线程,我们通常在一个进程中使用 IO 多路复用 + 非阻塞套接字的形式,以提升性能。一般来说我们会使用 epoll 去操作这些套接字,此时的做法演变为一个进程调用socket() + bind() + listen() + epoll_create(),然后使用 epoll_wait 去等待这个 listenfd 的事件。当这个 listenfd 有EOPLLIN事件后再相对应创建 clientfd 并仍然放入当前进程的 eventpoll 中,这样当前进程就可以同时处理多个套接字了。
单个进程的处理方式无法发挥 CPU 的多核性能,而且在现在的网络流量环境中,单个进程的处理性能也存在瓶颈,因此需要使用多进程的方式。注意这里的多进程是固定的数量,往往是服务器启动之后就创建的,因此没有动态创建和销毁的性能问题。这时的做法是在一个父进程中使用socket() + bind() + listen(),然后 fork 出多个子进程,每个子进程创建自己的 eventpoll,各自调用 epoll_wait 去监听这个 listenfd 的事件,注意对于所有的子进程来说,这个 listenfd 是同一个套接字。在这种做法下,当 listenfd 有相应可读的事件时,所有进程都会被唤醒,造成惊群问题。根本原因在于他添加到套接字等待队列的方式是prepare_to_wait的方式,即非互斥式的。
在没有 SO_REUSEPORT 标识和 EPOLLEXCLUSIVE 标识之前,要处理这个问题,只能采用手动加锁的形式。以 nginx 的处理措施为例:它利用了一把进程锁,每个进程在监听这个 listenfd 之前都会先尝试获取这把锁,如果获取成功则把这个 listenfd 放到自己的 eventpoll 中,并设置超时等待时间,在这段时间内如果成功的获取到事件则处理,否则时间到达之后则将其从自己的 eventpoll 中删除,并释放锁,实际上就是强制限定了同时间只会有一个进程进行监听。
而现在 epoll 支持使用EPOLLEXCLUSIVE标识,我们在每个进程中都使用 epoll_ctl 为该 listenfd 添加 EPOLLEXCLUSIVE 属性,这样当有事件到来时,只会唤醒其中的一个进程,这样就避免了惊群问题。
而 linux 提供了SO_REUSEPORT标识,这个标识的关键作用是允许多个 socket 同时监听相同的 IP + PORT,当有事件到来时,内核会自动负载均衡的选择唤醒其中一个 socket。因此在使用 SO_REUSEPORT 时,我们的做法变成了创建多个进程,每个进程独立的使用socket() + bind() + listen() + epoll_create(),在这个阶段中多个进程所监听的是同一个 IP + PORT,对于每个进程来说他们的 listenfd 不是同一个套接字,但却是监听了同一个地址和端口。该 IP + PORT 有事件到达时,内核根据负载均衡原则唤醒其中的一个进程,即对应监听的 eventpoll 会监听到可读事件,这样就避免了惊群问题。
注意的是 SO_REUSEPORT 参数必须在两条 socket 间同时设置,才能绑定成功,同时对于已经处于 TIME_WAIT 状态的 socket,绑定也会失败,因此一般同时使用 SO_REUSEADDR 和 SO_REUSEPORT 参数。
// 复用地址和端口号
// SO_REUSEADDR : 用以解决当服务器主动close之后处于TIME_WAIT状态时,重新启动时出现的地址被占用情况
// SO_REUSEPORT : 用以允许多个socket绑定到相同的ip和port,底层会把接收到的数据负载均衡到绑定的多个socket上
// 一般用以在多进程/多线程中提高负载。
int on = 1;
setsockopt(listenfd, SOL_SOCKET, SO_REUSEADDR, (char*)&on, sizeof(on));
setsockopt(listenfd, SOL_SOCKET, SO_REUSEPORT, (char*)&on, sizeof(on));
connect 报错
在上面的描述中,我们是服务端的角色,而当我们是客户端且开启了 SO_REUSEADDR 和 SO_REUSEPORT 后,意味着允许同时有多个 socket 拥有相同的 <protocol>, <src addr>, <src port>,这在未开启这两个参数时,bind() 阶段就已经报错了。一般来说,这种方式是比较少的,但是如果这样设置之后,在 connet() 阶段,如果这多个 socket 同时去连接一个目标地址和端口,则会由于整个五元组都相同,而造成异常。